CV Education Publications Google Scholar Outreach Presentations
Email: kbhatch[at]usc[dot]edu
I am a first-year PhD student at the University of Southern California (USC) co-advised by Yue Wang and Daniel Seita. My research interests lie primarily within machine learning, robotics, and reinforcement learning (RL). These days, I am especially excited about using human video data to help train generalist robot agents. Previously, I was an AI Resident in the Large Behavior Models (LBM) Division at the Toyota Research Institute (TRI). Before that, I studied computer science at Stanford University (B.S. with honors and M.S.).
I am extremely fortunate to have worked with many wonderful mentors during my time as a master’s and undergraduate student. I worked with Prof. Chelsea Finn in the Stanford IRIS Lab as an undergraduate and master’s student. I also worked with Prof. Mykel Kochenderfer as an undergraduate student in the Stanford Intelligent Systems Laboratory (SISL).
In my free time, I enjoy backpacking in the mountains, playing soccer, and watching horror movies.
Education
Stanford University
M.S. in Computer Science
Graduated: June 2023
Artificial Intelligence Track
Coterminal Master’s Program
Stanford University
B.S. in Computer Science with honors
Graduated: June 2022
Artificial Intelligence Track
Publications
For a complete list of publications, please see my Google Scholar profile.
Published/Accepted

Hatch, K.,, Balakrishna, A., Mees, O., Nair, S., Wulfe, B., Itkina, M., Eysenbach, B., Levine, S., Kollar, T., and Burchfiel, B., "GHIL-Glue: Hierarchical Control with Filtered Subgoal Images," IEEE International Conference on Robotics and Automation (ICRA), 2025. PDF Website Presentation

Rafailov, R.*, Kolev, V.*, Hatch, K. B., Wu, J., and Finn, C., ”Efficient Imitation Learning with Conservative World Models,” Learning for Dynamics & Control Conference (L4DC), 2024. PDF
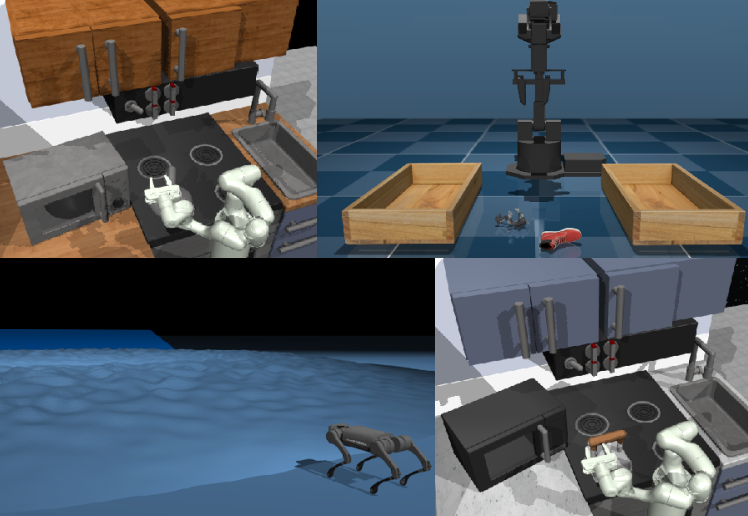
Rafailov, R.*, Hatch, K. B.*, Singh, A., Smith, L., Kumar, A., Kostrikov, I., Hansen-Estruch, P., Kolev, V., Ball, P., Wu, J., Finn, C., and Levine, S., "D5RL: Diverse Datasets for Data-Driven Deep Reinforcement Learning,” Reinforcement Learning Conference (RLC), 2024. PDF

Rafailov, R.*, Hatch, K. B.*, Kolev, V., Martin, J., Phielipp, M., and Finn, C., ”MOTO: Offline to Online Fine-tuning for Model-Based Reinforcement Learning,” Conference on Robot Learning (CoRL), 2023. PDF Website
Hatch, K. B., Eysenbach, B., Yu, T., Rafailov, R., Salakhutdinov, R., Levine, S., and Finn, C., ”Contrastive Example-Based Control,” Learning for Dynamics & Control Conference (L4DC), 2023. PDF Website Presentation (NeurIPS workshop version)
Zhou, G., Dean, V., Srirama, M. K., Rajeswaran, A., Pari, J., Hatch, K. B., Jain, A., Yu, T., Abbeel, P., Pinto, L., Finn, C., and Gupta, A., “Train Offline, Test Online: A Real Robot Learning Benchmark,” IEEE International Conference on Robotics and Automation (ICRA), 2023. PDF Website
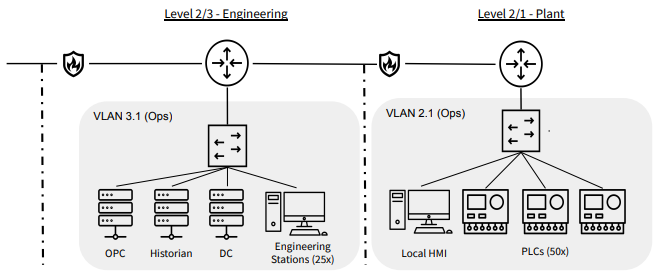
Mern, J., Hatch, K., Silva, R., Hickert, C., Sookoor, T., and Kochenderfer, M. J., "Autonomous Attack Mitigation for Industrial Control Systems," IEEE/IFIP International Conference on Dependable Systems and Networks Workshops (DSN-W), 2022, pp. 28–36. PDF
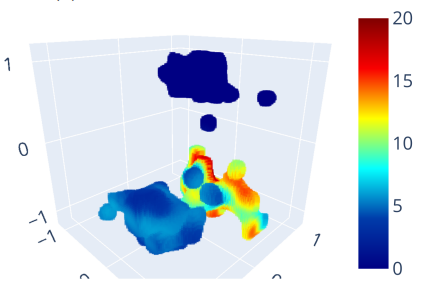
Senanayake, R.*, Hatch, K.*, Zheng, J., and Kochenderfer, M. J., "3D Radar Velocity Maps for Uncertain Dynamic Environments," IEEE International Conference on Intelligent Robots and Systems (IROS), 2021. PDF Presentation

Hatch, K., Mern, J., and Kochenderfer, M. J., "Obstacle Avoidance Using a Monocular Camera," AIAA SciTech Forum, 2021. PDF Presentation
* denotes equal contribution
Outreach
Breakthrough Silicon Valley (BTSV)
November 2023 – April 2024
Volunteer Tutor
Breakthrough Silicon Valley is an organization that provides academic support to middle school and high school students who are on track to becoming first-generation college students. I primarily provide homework support to high school students with mathematics.
East Palo Alto Stanford Academy (EPASA)
October 2018 – March 2020
Volunteer Tutor
EPASA is a program run through Stanford University in which undergraduate students tutor middle school students who attend school in East Palo Alto. I provided homework support to seventh and eighth grade students in math and English, and also helped them to develop effective study skills.
Stanford 1st Ward Volunteer Tutoring Program
September 2017 – June 2019
Volunteer Tutor
The Stanford 1st Ward Volunteer Tutoring Program is a program run through a local religious organization that provides free tutoring to K-12 students from around the South San Francisco Bay Area. I provided homework support students in math, reading, and English.
Video Presentations
“GHIL-Glue: Hierarchical Control with Filtered Subgoal Images”
“Offline Example-Based Control,” NeurIPS Offline RL and Deep RL Workshops, 2022.
“3D Radar Velocity Maps for Uncertain Dynamic Environments,” IEEE International Conference on Intelligent Robots and Systems (IROS), 2021.
“Obstacle Avoidance Using a Monocular Camera,” AIAA SciTech Forum, 2021.